
Abstraksi
Dalam rangka memenuhi tugas besar EL3014 Sistem Mikroprosesor dan modul 5 EL3214 Praktikum Sistem Mikroprosesor, dirancang sebuah robot omni-directional 3 roda dengan sensor warna dan LCD. Sistem yang dirancang akan mampu menerima input dari keypad dan menggerakkan robot sesuai dengan input yang diberikan. Roda digerakkan menggunakan motor DC yang didrive oleh LM2903. Sistem juga mampu mempercepat dan memperlambat gerak robot dengan memanfaatkan mode PWM pada timer AVR. Selain itu, sistem juga akan membaca warna jalan yang dilalui oleh robot dan menampilkan warnanya pada LCD.
1. Spesifikasi
1.1. Komponen yang Digunakan
- Atmega 32
- 2 x Driver Motor L293D
- 3 x Motor DC
- 4x Baterai AA 1.5V
- Kotak 4 Baterai
- LCD 16×2
- LDR
- LED merah, LED kuning, LED Hijau
- Port ISP
- Gearbox
- Keypad 3×4
- Supplai Batrai Lipo 3 cell
- Header 2×5
- Header 1×8
- Body mekanik menggunakan akrilik
1.2. Spesifikasi Sistem
- Tegangan motor 12 volt
- Tegangan sistem 5 volt
- Keypad memberikan 8 perintah. Key “1” menggerakkan motor pivot ke kiri, key “2” menggerakkan motor pivot ke kanan, key “7” menggerakkan motor ke kiri, key ”8” menggerakkan motor ke depan, key “9” menggerakkan motor ke kanan, key “” memperlambat gerak motor, key”0” menggerakkan motor ke belakang, dan key “#” mempercepat gerak motor. Tombol reset mengembalikan kecepatan motor menjadi kecepatan awal. LCD menampilkan contrast jalan dan warna jalan yang dilalui. LCD menampilkan pwm ketika tombol “” dan “#” ditekan.
- Sensor warna memancarkan cahaya dari 3 LED yang berbeda pada permukaan jalan dan memberikan masukkan ke ADC serta menentukan warna jalan dengan benar.
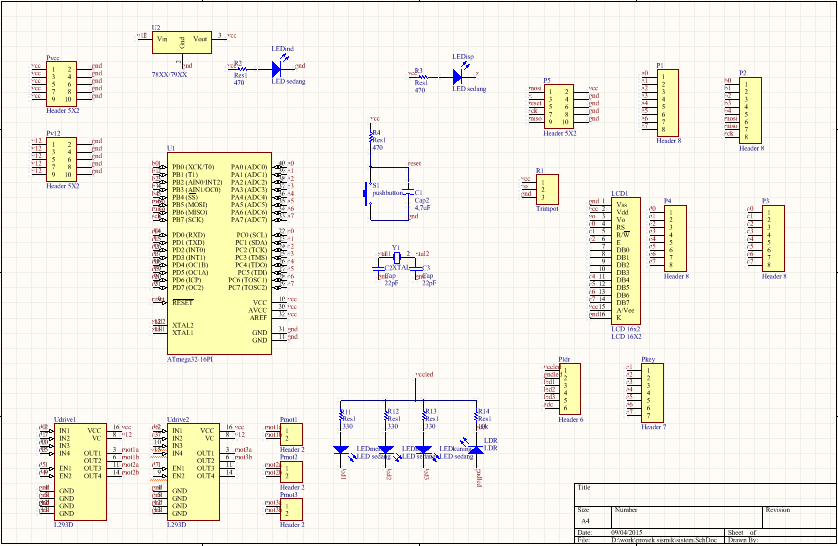
2. Desain Rangkaian
2.1. Skema Rangkaian
Rangkaian yang dirancang terdiri dari 2 bagian. Bagian pertama adalah sistem minimum yang terdiri dari beberapa bagian penting, yaitu mikrokontroler ATMEGA32, header LCD, header keypad, driver motor, header sumber 12V dan 5V. Bagian kedua adalah modul sensor warna yang terdiri dari beberapa bagian penting, yaitu LED merah, hijau, kuning, dan LDR. Berikut adalah skematik rangkaian yang diimplementasikan pada PCB dengan altium designer release 13.
2.2 Cara Kerja Rangkaian
Berikut beberapa pointer mengenai cara kerja rangkaian :
- PORT ISP: Hubungan downloader antara port ISP dan port USB laptop akan memberikan supply tegangan 5 V, sehingga seluruh antarmuka dan komponen yang memiliki spesifikasi kerja 5 V akan berjalan. Namun, driver motor yang membutuhkan tegangan 12 V masih tidak dapat dijalankan. Port ISP ini berfungsi untuk jalur komunikasi antara laptop (tempat memrogram) dan Atmega32 (mikrokontroler sismin).
- ATMega32: Chip mikrokontroler yang akan diprogram menggunakan laptop dan berfungsi untuk mengatur kerja sistem yang dirancang.
- Keypad: Output keypad dihubungkan pada port A1-A4 dan input keypad dihubungkan pada port A5-A8. Selanjutnya, port-port ini akan diatur dan diprogram untuk melakukan scanning keypad pada bagian implementasi software.
- Pushbutton: Ketika pushbutton ditekan, pin reset pada ATMega32 yang bersifat active low akan digroundkan sehingga sistem akan menjalankan perintah dari awal kembali (reset).
- Sumber 5V: Sumber ini dihubungkan pada mikrokontroler ATMega32, LCD, LED indikator, dan modul sensor warna untuk membuat sistem bekerja.
- Sumber 12V: Sumber ini dihubungkan pada sumber daya motor agar motor yang bekerja pada tegangan 12V dapat dijalankan.
- Pin D4, D5, dan D7 yang merupakan pin OCR1A, OCR1B, dan OCR2 dihubungkan pada pin EN driver motor untuk mengatur kecepatan motor menggunakan mode PWM.
- Modul Sensor Warna: Modul ini memiliki keluaran yang dihubungkan pada pin A0 sebagai ADC yang akan mengkonversikan data analog menjadi digital. LED merah, kuning dan hijau dihubungkan pada pin B0-B2 dan dikontrol agar menyala secara bergantian pada bagian implementasi software.
3. Implementasi Rangkaian
3.1. Layout PCB
Berikut adalah desain sistem minimum dan modul sensor warna yang diimplementasikan pada PCB dengan altium de-signer release 13.

Dalam perancangan PCB, pengaturan yang digunakan adalah :
- Preferred Width : 10 mil
- Min Width : 10 mil
- Max Width : 10 mil
- Single Layer
Pengaturan tersebut dilakukan agar pada desain PCB tidak terjadi short serta sesuai rule minimal tempat kami mencetak PCB. Kemudian, penggunaan single layer dipilih untuk meminimalkan cost yang diperlukan dalam implementasi rangkaian.
3.2. Desain dan Teknik Implementasi Arah Gerakan Robot



Robot yang dirancang merupakan robot omni-directional 3 roda. Artinya, sudut antara setiap sumbu roda memiliki besar 120o. Agar visualisasi model robot lebih mudah, sumbu-sumbu roda robot dapat diamati pada gambar 3.2.2. Robot kami desain sedemikian rupa, sehingga untuk menggerakkan robot ke arah tertentu, arah gerak roda-roda dapat direpresentasikan dengan persamaan berikut :
Catatan: Sumbu x positif menunjukkan arah kanan, sumbu y positif menunjukkan arah depan, V menunjukkan kecepatan gerak roda.
Arah Depan
| Roda 1 | : v=-Vcos60°x+Vsin60°y |
| Roda 2 | : v=Vcos60°x+Vsin60°y |
| Roda 3 | : v=0 |
| Resultan | : v=2Vsin60°y |
Belok Kiri
| Roda 1 | : v=-0.5Vcos60°x+0.5Vsin60°y |
| Roda 2 | : v=-0.5Vcos60°x-0.5Vsin60°y |
| Roda 3 | : v=-Vx |
| Resultan | : v=-2Vx |
Belok Kanan
Roda 1 : v=0.5Vcos60°x-0.5Vsin60°y
| Roda 1 | : v=0.5Vcos60°x-0.5Vsin60°y |
| Roda 2 | : v=0.5Vcos60°x+0.5Vsin60°y |
| Roda 3 | : v=Vx |
| Resultan | : v=2Vx |
Roda 2 : v=0.5Vcos60°x+0.5Vsin60°y
Roda 3 : v=Vx
Resultan : v=2Vx
Arah Belakang
Roda 1 : v=Vcos60°x-Vsin60°y
Roda 2 : v=-Vcos60°x-Vsin60°y
Roda 3 : v=0
Resultan : v=-2Vsin60°y
Pivot Kiri
Roda 1 : v=-Vcos60°x+Vsin60°y
Roda 2 : v=-Vcos60°x-Vsin60°y
Roda 3 : v=Vx
Resultan :0 (Robot tidak bergerak, hanya berputar di tempat ke arah kiri).
Pivot Kanan
Roda 1 : v=Vcos60°x-Vsin60°y
Roda 2 : v=Vcos60°x+Vsin60°y
Roda 3 : v=-Vx
Resultan :0 (Robot tidak bergerak, hanya berputar di tempat ke arah kanan).
sumbuGambar 3-2-2 Sumbu Roda Robot
Implementasi Software
4.1 Diagram Blok
Diagram blok dari sistem dapat diamati pada gambar berikut :
Diagram Blok-1Gambar 4-1-1 Diagram Blok
4.2 Scanning Keypad
Pada sistem ini, keypad berfungsi untuk memberikan masukkan yang kemudian digunakan untuk mengontrol gerak dan kecepatan robot. Cara kerja scanning keypad dilakukan dengan memeriksa tombol yang ditekan secara per-baris. Karena scanning dilakukan secara per-baris dan keypad merupakan keypad 3 kolom 4 baris, maka 4 pin dari keypad diatur sebagai output dan 3 pin dari keypad diatur sebagai input. Sebelum mengimplementasikan teknik scanning keypad, pull-up resistor perlu diaktifkan dengan menginisialisasi PUD pada SFIOR. Kemudian, pada fungsi scanning keypad itu sendiri, setiap pin output diset ‘LOW’ satu persatu. Setelah pin output diset ‘LOW’, akan dilakukan pengecekan pada pin-pin input keypad dan dilihat mana yang memiliki logika ‘LOW’. Pasangan pin output dan input yang berlogika ‘LOW’ menunjukkan tombol keypad yang ditekan. Setelah tombol yang ditekan telah diketahui, fungsi akan mengembalikan karakter yang dari tombol tersebut. Pada sistem ini, tombol keypad yang digunakan hanya tombol ‘1’, ‘3’, ‘7’, ‘8’, ‘9’, ‘*’, ‘0’, dan ‘#’. Oleh sebab itu, pengecekkan baris kedua pada keypad tidak diperlukan. Flowchart dari fungsi scanning keypad dapat diamati pada gambar berikut :
KeypadGambar 4-2-1 Flowchart Fungsi Scanning Keypad
4.3 Prosedur LED
LED merah, hijau, dan kuning merupakan bagian dari modul sensor warna yang berfungsi untuk memancarkan sinar ke permukaan jalan. LED merah, hijau, dan kuning diatur agar menyala secara bergantian masing-masing selama 10ms. Waktu 10ms ini dipilih agar waktu yang termakan untuk menjalankan fungsi ini tidak terlalu besar dan tidak mengganggu proses lainnya seperti scanning keypad dan penggerakkan motor. LED merah, hijau, dan kuning dihubungkan pada PORT B0-B2, sehingga sebelum memanggil prosedur ini, PORT B0-B2 perlu diinisialisasi pada fungsi utama sebagai output. Pemberian delay 10ms dilakukan dengan menggunakan delay avr yang librarynya telah dimasukkan. Pada implementasi rangkaian, LED diatur agar bersifat active low. Oleh sebab itu, prosedur LED akan mengeset PORT B0-B2 “LOW” secara bergantian untuk menyalakan ketiga LED secara bergantian. Flowchart dari fungsi LED dapat diamati pada gambar berikut :
LEDGambar 4-3-1 Flowchart Prosedur LED
4.4 Fungsi Read ADC
Keluaran dari modul sensor warna merupakan tegangan analog dari LDR. Oleh sebab itu, diperlukan ADC untuk mengkonversi tegangan analog tersebut menjadi data digital. Fungsi ini akan membaca keluaran ADC dan mengembalikan nilainya ke fungsi utama. Flowchart dari fungsi ini dapat diamati pada gambar berikut :
ADC
Gambar 4-4-1 Flowchart Fungsi Read ADC
4.5 Program Utama
Pada program utama, akan dilakukan beberapa hal diantaranya :
Inisialisasi
Pada bagian inisialisasi, program utama akan menginisialisasi register timer, I/O, dan LCD. Motor yang dikendalikan berjumlah 3 buah, oleh sebab itu cukup digunakan 2 buah timer, yaitu timer 1 (memiliki 2 buah register compare) dan timer 2. Register-register timer ini akan diinisialisasi sehingga bekerja pada mode PWM dan interupt untuk compare match aktif. Interupt pada compare match perlu diaktifkan karena pin-pin enable dari motor dihubungkan pada pin-pin compare timer ATMega32. I/O perlu diinisialisasi untuk mengatur port mana yang bekerja sebagai input dan port mana yang bekerja sebagai ouput. DDR port-port yang terhubung pada LED, LCD, compare timer, dan output keypad diset “HIGH”. DDR port-port input seperti input keypad diset “LOW”. Selain itu, dilakukan juga inisialisasi ADC untuk mengaktifkan pin ADC. Hal lain yang perlu dilakukan adalah mengeset PUD pada SFIOR “LOW” untuk mengaktifkan pull-up resistor dan mengaktifkan global interrupt.
Looping while(1)
Pada bagian ini, dilakukan beberapa hal, yaitu :
Pemanggilan fungsi-fungsi
Program utama akan memanggil fungsi led, fungsi keypad, dan read adc secara berulang-ulang untuk pengolahan lebih lanjut.
Menampilkan warna jalan
Setelah menjalankan fungsi read adc, program utama akan menentukan lokasi tampilan contrast pada baris kedua LCD menggunakan perintah lcd gotoxy yang telah tersedia pada library alcd.h. Kemudian, program mencetak nilai contrast menggunakan perintah sprintf yang telah tersedia pada library stdio.h. Berdasarkan nilai contrast yang dibaca, program akan menentukan warna jalan sesuai database warna yang telah dibuat.
Menggerakkan dan mengatur kecepatan robot
Program utama akan terus mengupdate kecepatan motor 3 dengan mendefinisikan nilai OCR2. Motor 1 dan 2 tidak langsung diupdate kecepatannya karena arah gerak robot menentukan kecepatan motor 1 dan motor 2. Motor 1 dan motor 2 memiliki kecepatan yang berbeda untuk gerak belok, gerak pivot dan maju-mundur, oleh sebab itu update kecepatan motor 1 dan motor 2 dilakukan dalam perintah conditional if jika tombol yang menggerakkan motor ditekan. Setelah menjalankan fungsi keypad, program utama akan mengeksekusi perintah sesuai dengan masukkan keypad yang diberikan. Ketika tombol-tombol penggerak motor, yaitu tombol ‘1’, ‘3’, ‘7’, ‘8’, ‘9’, dan ‘0’ ditekan, pin-pin arah motor akan diset sehingga menghasilkan arah gerak sebagai berikut : (Keterangan : sumbu x positif merepresentasikan arah kanan, dan sumbu y positif merepresentasikan arah depan).
Arah Depan (Tombol 8)
Motor 1 :-x+y
Motor 2 :x+y
Motor 3 : Diam
Belok Kiri (Tombol 7)
Motor 1 :-x+y
Motor 2 :-x–y
Motor 3 😡
Pivot Kiri (Tombol 1)
Motor 1 :-x+y
Motor 2 :-x–y
Motor 3 😡
Belok Kanan (Tombol 9)
Motor 1 :x–y
Motor 2 :x+y
Motor 3 😡
Pivot Kanan (Tombol 3)
Motor 1 :x–y
Motor 2 :x+y
Motor 3 😡
Arah Belakang (Tombol 0)
Motor 1 :x–y
Motor 2 :-x–y
Motor 3 : Diam
Selain penentuan arah, dilakukan juga update kecepatan motor 1 dan motor 2 sebelum motor digerakkan. Kecepatan motor 1 dan motor 2 saat bergerak ke depan, ke belakang, pivot kiri, dan kanan sama dengan kecepatan motor 3. Sedangkan, ketika belok ke kiri atau ke kanan, motor 1 dan motor 2 memiliki kecepatan 2x lebih lambat daripada motor 3. Jika tombol-tombol pengatur kecepatan motor ditekan, variabel yang menyimpan nilai OCR akan di-increment dan di-decrement bergantung tombol mana yang ditekan. Bila tombol ‘*’ ditekan, variabel akan di-increment sehingga kecepatan motor berkurang. Bila tombol ‘#’ ditekan, variabel akan di-decrement sehingga kecepatan motor bertambah.Variabel ini kemudian akan diupdate sebagai nilai register compare OCR timer 1 dan timer 2 yang mengatur kecepatan motor. Semakin kecil nilai OCR, semakin cepat register TCNT timer mencapai nilai OCR. Nilai pada register Counter TCNT akan terus menerus naik sampai nilai maximum, lalu kembali ke 0. begitu seterusnya selama sinyal clock diberikan kepada timer. Nilai OCR diset untuk mengatur pembentukan PWM.
saat nilai TCNT > nilai OCR maka pin OC mengeluarkan sinyal HIGH ,
saat nilai TCNT < nilai OCR maka pin OC mengeluarkan sinyal LOW.
Ingat bahwa pin-pin OC dihubungkan pada pin-pin enable motor. Sehingga, semakin kecil nilai variabel penyimpan nilai OCR, pulsa PWM semakin lebar dan semakin cepat motor bergerak (begitu juga sebaliknya).. Ketika tombol ini ditekan, program juga akan membersihkan tampilan LCD, kemudian mencetak nilai variabel tersebut pada layar LCD selama 0.3 detik.
Flowchart dari program utama dapat diamati pada gambar berikut :
main
Gambar 4-5-1 Flowchart Program Utama
4.6 Software yang Digunakan
Dalam perancangan dan implementasi sistem, digunakan beberapa software, yaitu CVAVR, progisp, Altium Designer, dan SolidWorks. CVAVR digunakan untuk memprogram mikrokontroler. Kemudian, progisp digunakan untuk mendownload program yang telah dibuat ke dalam mikrokontroler. Perancangan desain skematik dan layout PCB dilakukan menggunakan Altium Designer. Perancangan desain mekanik robot diakukan menggunakan software SolidWorks.
Pengujian dan Analisa
5.1 Pengujian yang Dilakukan
Pengujian yang kami lakukan adalah :
Pengujian Power Supply
Mengukur tegangan pada pin-pin sumber tegangan secara langsung menggunakan multimeter. Pengecekkan dilakukan dengan menghubungkan baterai 12 V pada pin sumber tegangan 12 V, kemudian mengukur tegangan pada pin-pin daya motor yang disuplai oleh sumber tegangan 12 V ini. Kemudian, dilakukan juga pengecekkan tegangan pada pin-pin sumber tegangan 5 V yang merupakan keluaran dari LM7805. Hasil pengukuran tegangan yang diperoleh pada pin sumber 12 V adalah 12V dan pengukuran tegangan yang diperoleh pada pin sumber 5V adalah 5 V. Sehingga, pengujian menunjukkan bahwa suplai tegangan pada sistem telah sesuai.
Pengujian ATMega32 dan Port ISP
Pengujian dilakukan dengan menghubungkan ATMega32 dan PORT ISP menggunakan USBasp. Setelah dihubungkan, software progisp dibuka dan digunakan untuk membaca chip ATMega32. Apabila pembacaan id chip berhasil dan tidak keluar notice “chip programming error”, maka hubungan ATMega32 dan Port ISP sudah benar. Kemudian, chip diprogram dengna test program untuk mengecek apabila program berhasil didownload ke dalam chip. Pengujian menunjukkan bahwa ATMega32 dan PORT ISP bekerja dengan baik.
Pengujian Reset Button
Pengujian reset button dilakukan dengan merubah kecepatan motor menggunakan keypad. Kemudian, nilai kecepatan motor dicek melalui LCD. Ketika reset button ditekan, tampilan nilai kecepatan motor kembali ke nilai semula. Oleh sebab itu, pengujian menunjukkan bahwa reset button bekerja dengan benar.
Pengujian Keypad dan LCD
Pengujian keypad dan LCD dilakukan dengan program sederhana yang melakukan scanning keypad per-baris dan menampilkan hasil scanning pada LCD. Tampilan LCD untuk setiap penekanan tombol dapat diamati pada tabel berikut :
Tabel 5.1.1 Hasil Uji Keypad dan LCD
Tombol Keypad
Display LCD
1
1
2
2
3
3
4
4
5
5
6
6
7
7
8
8
9
9
*
*
0
0
#
#
Hasil pengujian keypad dan LCD telah menunjukkan hasil yang sesuai harapan, maka keypad dan LCD telah bekerja dengan baik.
Pengujian Motor dan Timer
Pengujian robot dilakukan menggunakan bantuan keypad yang telah diuji sebelumnya. Sistem akan diprogram sehingga menggerakkan robot sesuai masukkan keypad. Gerakan robot untuk setiap penekanan tombol dapat diamati pada tabel berikut :
Tabel 5.1.2 Hasil Uji Motor dan Timer
Tombol Keypad
Gerakan Motor
1
Pivot Kiri
3
Pivot Kanan
7
Belok Kiri
8
Maju
9
Belok Kanan
*
Semakin Lambat
0
Mundur
#
Semakin Cepat
Hasil pengujian motor dan timer telah menunjukkan hasil yang sesuai harapan, maka motor dan timer telah berfungsi dengan baik.
Pengujian Modul Sensor Warna
Modul sensor warna diuji dengan meletakkan robot pada lintasan yang terbuat dari karton yang terdiri dari beberapa warna, yaitu merah, hijau, biru, dan kuning. Sistem akan dijalankan dan hasil display warna pada LCD akan diamati apabila sesuai dengan warna karton. Display LCD terhadap warna lintasan robot dapat diamati pada tabel berikut :
Tabel 5.1.3 Hasil Uji Modul Sensor Warna
Warna Karton Display LCD
Merah Merah
Hijau Hijau
Biru Biru
Kuning Kuning
Hasil pengujian modul sensor warna telah menunjukkan hasil yang sesuai harapan, maka modul sensor warna telah berfungsi dengan baik.
Pengujian Sistem secara Keseluruhan
Pengujian sistem secara keseluruhan dilakukan dengan menggerakkan robot pada lintasan berwarna. Arah gerak robot terhadap input keypad telah sesuai dengan tabel 5.1.2 dan display warna pada LCD telah sesuai dengan tabel 5.1.3. Maka, sistem yang dirancang secara keseluruhan telah berfungsi dengan benar.
5.2 Masalah yang Dihadapi
Dalam merancang dan mengerjakan sistem minimum, ada beberapa masalah yang ditemukan sehingga perlu dilakukan debugging dan troubleshooting. Masalah-masalah yang ditemukan adalah :
Board Pertama Gagal
PCB sistem minimum yang pertama kami cetak gagal karena tempat percetakkan PCB tidak melubangi seluruh pin yang digunakan. Sehingga, dilakukan pencetakkan ulang.
VCC dan Ground Short
Setelah seluruh komponen disolder dan ditempatkan pada PCB, terdapat hubungan short antara VCC dan ground. Permasalahan kemudian dapat diselesaikan dengan merapikan solderan.
Terdapat VCC 5V yang Terhubung
VCC dari PORT ISP tidak terhubung dengan pin-pin sumber 5V lainnya. Sehingga, ketika board dihubungkan dengan PC, sistem tidak tersuplai oleh sumber tegangan 5V. Permasalahan ini dapat diselesaikan dengan memberikan jumper untuk menghubungi VCC PORT ISP dengan salah satu pin sumber 5V.
Manajemen Power
Penggunaan 3 buah motor DC membuat arus yang mengalir pada sistem kurang dan menyebabkan terjadinya brown out. Hal ini menyebabkan sistem langsung reset. Masalah dapat diselesaikan dengan menambahkan sumber tegangan lain dari 4 buah batre 1.5V untuk menyuplai sistem, sehingga sumber 12V tidak terlalu terbebani.
Pengaruh Cahaya Luar terhadap Pembacaan LDR
Intensitas cahaya dari luar mempengaruhi pembacaan LDR, sehingga modul sensor warna tidak dapat dikalibrasi dengan tepat. Hal ini dapat diatasi dengan memasang penutup untuk mengisolasi cahaya pantulan dari LED dan mencegah interferensi dari cahaya luar.
Nilai Kontras Pembacaan Sensor Warna Hampir Sama untuk Beberapa Warna
Karena sensor warna dibuat secara manual, hasil pembacaannya tidak terlalu akurat. Sebagai contoh, warna kuning dan putih menghasilkan hasil pembacaan nilai contrast yang hampir sama. Sehingga, dapat terjadi kesalahan pembacaan warna pada lintasan kuning dan putih.
5.3 Foto Alat
closed up sistemGambar 5-3-1 Close Up Sistem
closed up modul
Gambar 5-3-2 Close Up Modul Sensor Warna
robot pada lintasan
Gambar 5-3-3 Robot pada Lintasan Warna
Kesimpulan
Kesimpulan yang diperoleh dari proses perancangan dan implementasi sistem adalah :
Alat telah mampu untuk menyuplai tegangan 12 V pada motor dan driver.
Alat telah mampu untuk menyuplai tegangan 5 V pada sistem.
Proses scanning keypad telah berhasil dilakukan dengan benar dan gerakan motor telah sesuai dengan input yang diberikan pada keypad.
Tombol reset dapat berfungsi dengan baik.
LCD telah berhasil menampilkan contrast jalan dan warna jalan yang dilalui.
LCD telah berhasil menampilkan pwm ketika tombol “*” dan “#” ditekan.
Sensor warna telah berhasil memancarkan cahaya dari 3 LED yang berbeda pada permukaan jalan dan memberikan masukkan ke ADC serta menentukan warna jalan dengan benar.
Seluruh spesifikasi sistem telah berhasil dicapai.
- Video